
De l'électronique à la mécanique
Pourquoi?
Le robot que j'ai conçu est destiné à servir de modèle pour expliquer les concepts de base de la mécanique et de l'électronique au sein du fablab où je travaille. Il permet également de découvrir la programmation et la commande d'un robot manipulateur en utilisant différents langages et protocoles de communication.
Les choix de l'électronique
L'électronique utilisée dans ce projet est intégrée à chaque articulation du bras robotique. Cela permet de gérer les mouvements de rotation dans toutes les directions sans limites matérielles. Cependant, cela rend l'utilisation de câbles difficile, car ils finiraient par s'enrouler autour des axes et se débrancher. J'ai donc opté pour l'utilisation de collecteurs rotatifs pour transmettre les données et l'énergie à travers les axes de rotation.
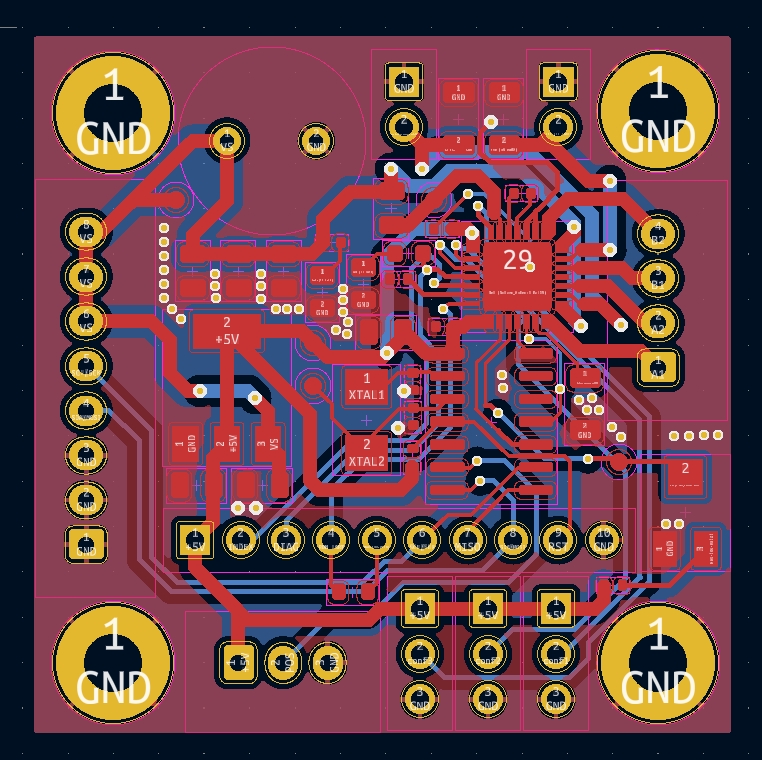
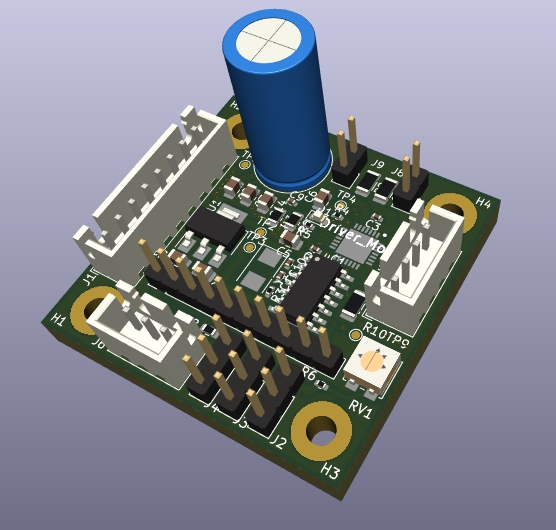
Le PCB
Le circuit imprimé est équipé d'un microcontrôleur ATTINY qui récupère les données envoyées via une liaison série I2C, les traite et les transmet au TMC2209 qui gère la partie contrôle de puissance du moteur pas à pas. Le système est alimenté par le même collecteur rotatif qui permet de faire passer des courants élevés pour alimenter les différents moteurs et microcontrôleurs. L'adaptation de la tension est réalisée par un AMS1117 5V pour les composants qui le nécessitent.
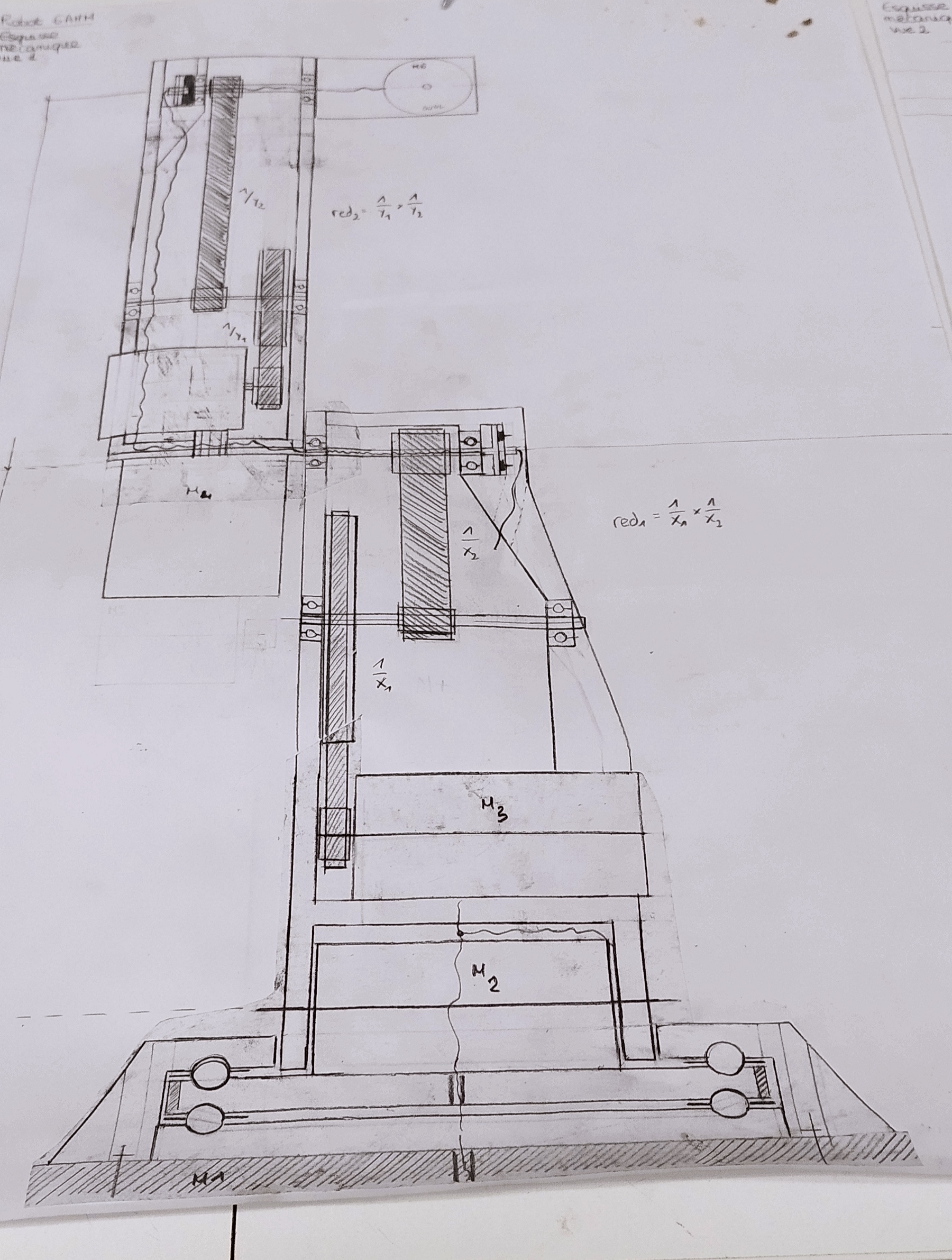
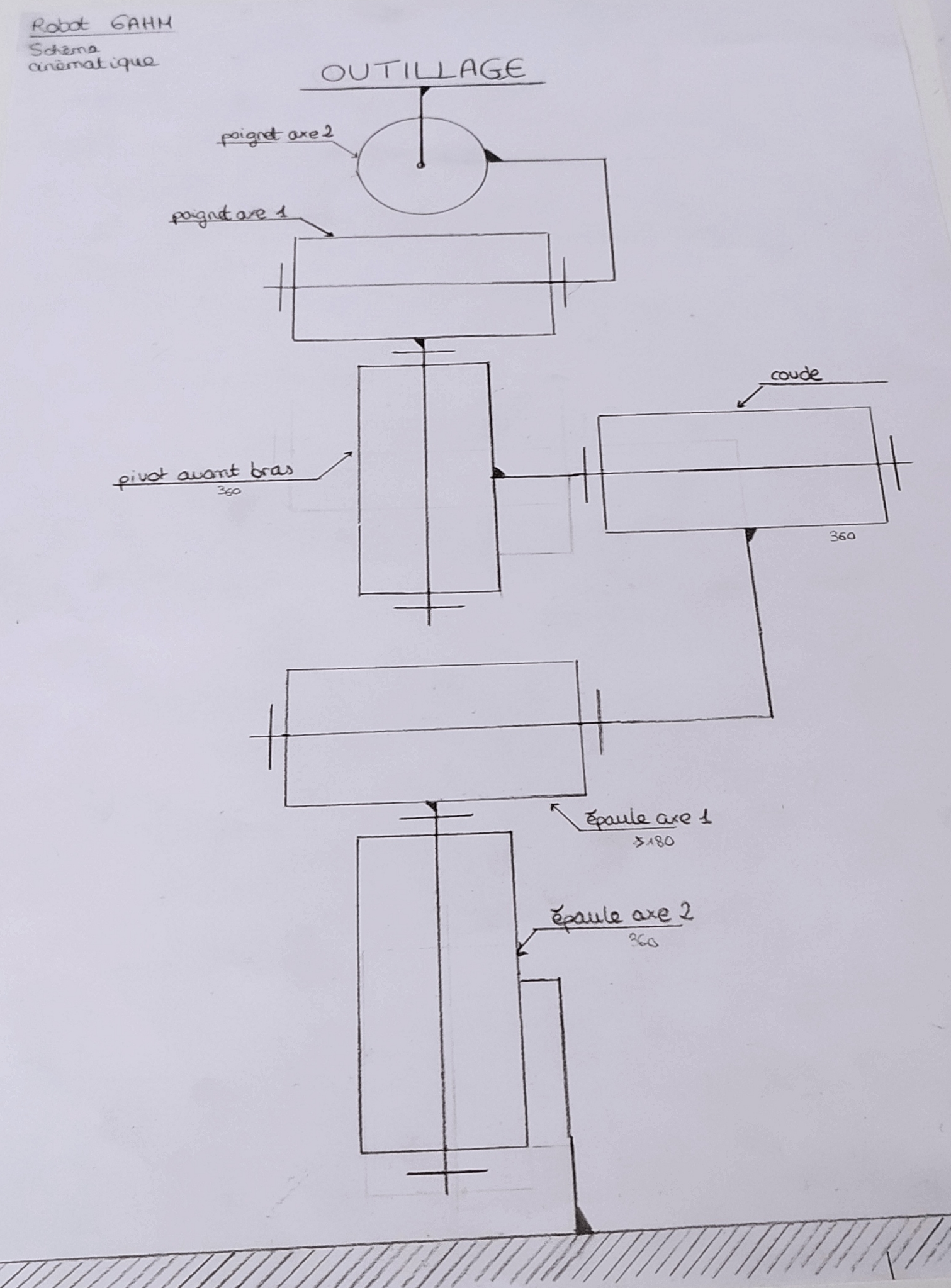
La mécanique
La mécanique du robot est encore en cours de développement. Les schémas que j'ai créés me permettent de mieux comprendre l'ampleur du projet et de rendre les calculs plus lisibles. Je continue à travailler sur cette partie pour améliorer les performances de ce robot innovant.