
Le pilotage simple et performant Github
Voiture
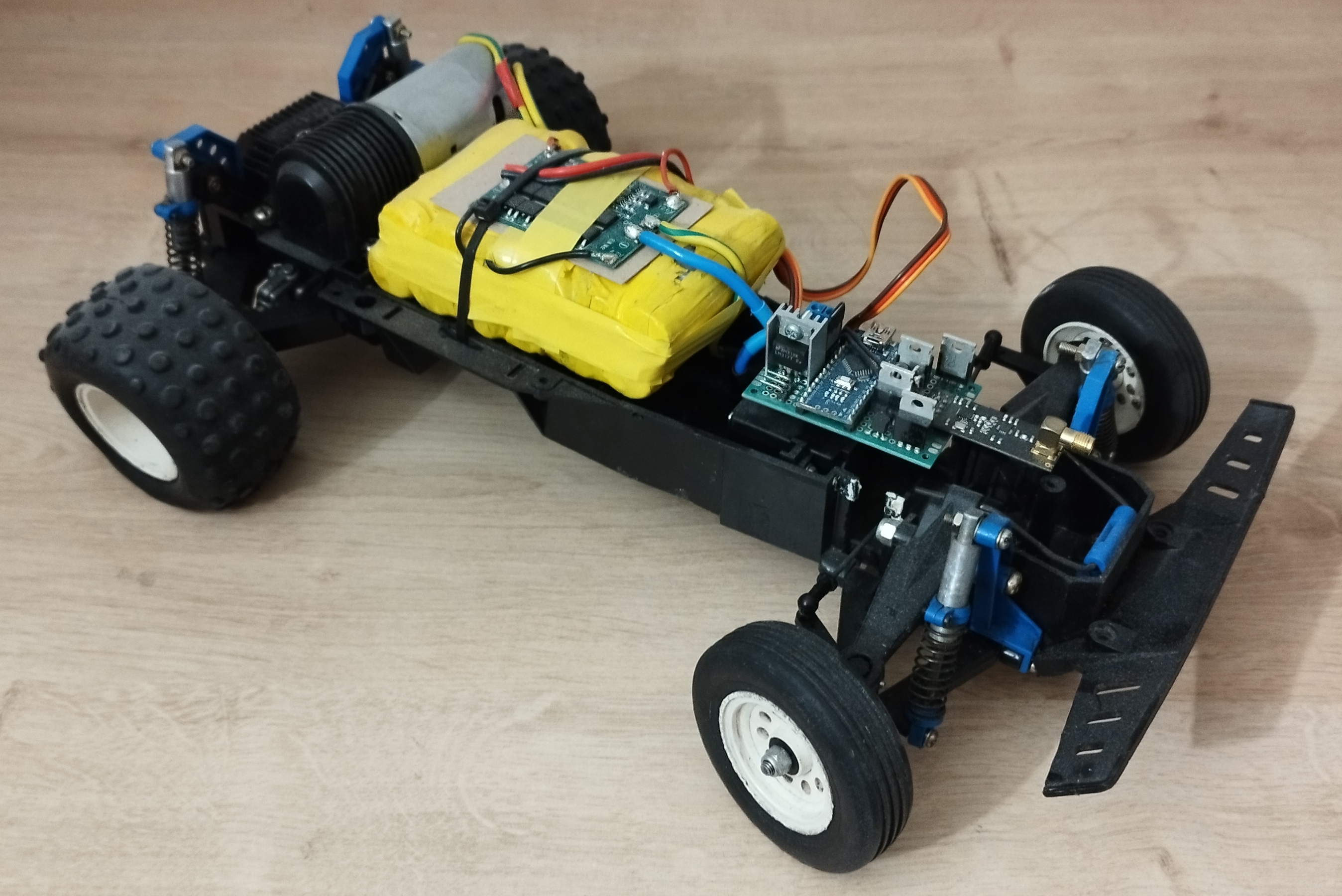
La voiture radiocommandée que j'ai réparée à partir d'une vieille voiture est équipée d'un châssis plastique léger et résistant aux chocs. Je l'ai beaucoup modifié en retirant les parties inutiles en changeant le moteur DC et en remplaçant un engrenage du différentiel initialement en plastique, par un engrenage en aluminium pour augmenter le couple transmissible et l'accélération maximale. Les suspensions ajustables permettent de s'adapter à tous les types de terrains et les pneus à haute adhérence assurent une traction maximale. Le design extérieur avec les composants et la batterie visible donne une touche de style même si plus tard une coque en plastique sera ajoutée pour protéger les composants des tonneaux qui sont coutume.
Circuit électronique
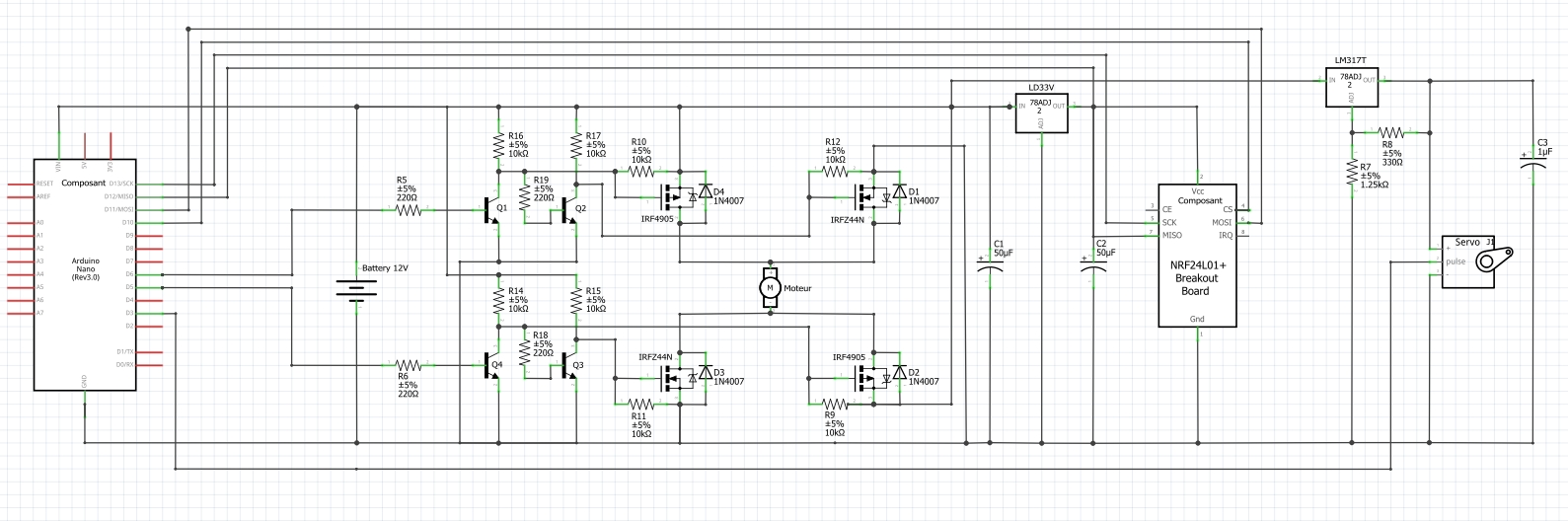
Le circuit électronique est le plus simple possible pour limiter la masse embarquée. Le microcontrolleur est une arduino nano qui asservie la vitesse du moteur en boucle ouverte via des transistor bipolaire pour l'adaptation de tension des transistor à effet de champ IRZ44N et IRF4905 qui forment un pont en H pour un contrôle bidirectionnel. Un régulateur de tension permet d'alimenter en 3.3v le NRF24L01+ permettant de communiquer avec la manette en 2.4Ghz sur des distances pouvant atteindre le km dans les conditions les plus favorables. Un autre régulateur de tension permet d'alimenter le servomoteur s'occupant de la direction et étant contrôlé par l'arduino lui aussi en PWM. Une batterie 12V lithium ions faite à partie d'une batterie de récupération permet d'alimenter tout ce circuit.

Manette
La manette elle aussi construite autour d'un arduino nano et d'un NRF24L01+ possède aussi 2 joysticks pour contrôler la poussée et la direction ainsi que d'un écran pour afficher le niveau de batterie et bien d'autres données. Elle peut être alimentée par une batterie externe où sur le secteur en 5v ou plus pour limiter l'utilisation des batteries quand elles ne sont pas nécessaires.